Moodsad pehmerobotid võivad tulevikus olla suureks abiks energeetikas, tööstuses ja meditsiinis, kuid selleks vajavad nad hoopis teistsugust ülesehitust. Nad ei saa toetuda jämedatele kaablitele, jäikadele plaatidele ega suurtele akudele, sest need piiravad paindlikkust. Üha rohkem teadlasi otsib lahendusi, mis meenutaksid pigem elusorganismi kui klassikalist masinat.
Pehme keha kui aju, lihased ja närvid üheskoos
Selles visioonis on andurid, liikumine ja energiaallikas koondatud ühte pehmesse kehasse, justkui lihased ja närvid. Niisugust lähenemist nimetatakse kehastunud ehk inkorporeeritud intelligentsiks – osa juhtimisest on sõna otseses mõttes põimitud roboti struktuuri. Mida enam robot suudab oma keha kaudu tajuda ja reageerida, seda vähem vajab ta väliseid juht- ja abisüsteeme.
Singapuri teadlased lähenesid uuele lahendusele
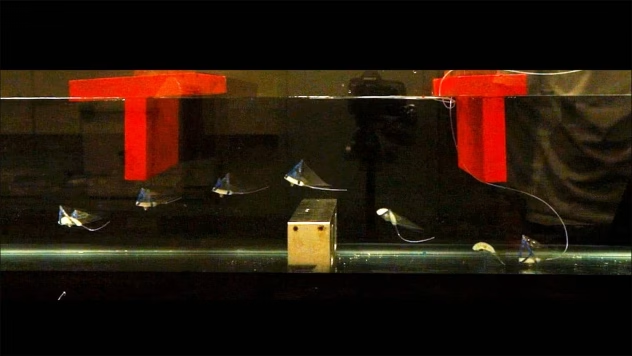
Sellisele ideele jõudsid lähemale National University of Singapore teadlased. Nad lõid pehme roboti, mille kuju on inspireeritud raidest ning mis liigub vees magnetväljade abil. Oluline on see, et samad magnetväljad aitavad ka roboti paindlikel akudel kauem ja stabiilsemalt töötada.

Magnetiline liikumine ja energialli allika stabiilsus
Ajakirjas Science Advances avaldatud uuring näitas, et magnetväljad täidavad roboti puhul topeltrolli. Need panevad liikuma roboti „pelekad“, kuid samal ajal stabiliseerivad ka akus toimivaid elektrokeemilisi protsesse. Nii püsib energiaallikas töökindel isegi siis, kui roboti keha vees tugevalt paindub ja lainetab.
Robot kasutab tsingi- ja mangaanipõhiseid akusid, kus katoodimaterjalina on mangaan(IV)oksiid. See keemia on tavaliselt odavam ja ohutum kui liitiumioonakud. Samas kipuvad sellised akud sagedase laadimise korral kiiremini kuluma. Magnetvälja mõju vähendab seda nõrkust – aku suudab kauem säilitada oma esialgset mahtuvust.
Kuidas akud pehmesse kehasse paigutati?

National University of Singapore uurimisrühm paigutas aku elemendid pehme silikoni sisse ja seadis need roboti sees vertikaalsetesse „virnadesse“. Nii jäi roboti ülaossa ja külgedele ruumi pehmetele „mootoritele“ ja anduritele, samas kui kogu keha säilis õhukese ja paindlikuna. Kuna jäikasid detaile on vähe, saab robot lainetada peaaegu sama vabalt nagu päris kala.
Roboti „pelekad“ on valmistatud magnetilistest elastomeeridest. Neid hakivad rütmiliselt liikuma ümbruses asuvad mähised, mis loovad muutuvat magnetvälja. Sama väli läbib ka akuelementide virna ning mõjutab õrnalt ioonide liikumist aku sees. Pärast kahesada laadimistsüklit säilitas aku umbes 57% algsest mahtuvusest – umbes kaks korda rohkem kui ilma magnetvälja mõjuta.
Mida see tähendab pehmerobotite tulevikule?
Füüsikaline selgitus on suhteliselt sirgjooneline: magnetväli ühtlustab tsinkioonide voo ega lase neil moodustada ohtlikke nõelataolisi struktuure. Samal ajal tugevneb katoodi kristallstruktuur, mistõttu kulumine aeglustub ja energiakahjud vähenevad. Autorid nimetavad seda lahendust kahekordseks magnet-elektrokeemiliseks stabiliseerimiseks, sest mõju avaldub nii anoodile kui ka katoodile.
Praegu suudab selline robot ujuda vaid kontrollitud katsebasseinides, kus teda ümbritsevad tugevad välised magnetid. Ometi on lähenemine paljulubav, sest sama jõud, mis robotit liigutab, aitab ka tema energiavarusid hoida. Nii võivad tuleviku pehmed robotid olla oma olemuselt pigem nagu nutikad koed kui klassikalised mehhanismid. Teadlased plaanivad rakendada seda meetodit ka teistele akukeemiatele ja energiat salvestavatele kiududele, et liikumine, taju ja toide sulanduksid ühtseks tervikuks.